SynScope - Signal Visualization and
Alignment Tool
Purpose
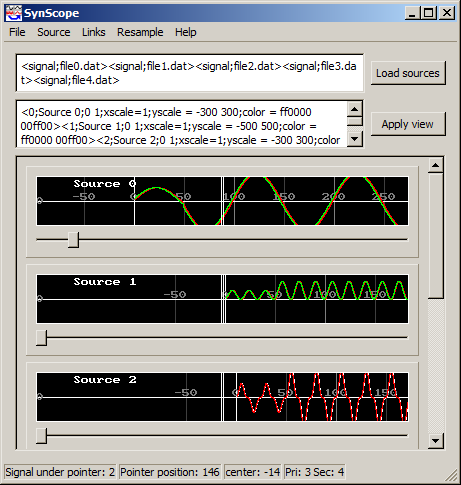
SynScope is an offline visualization and alignment tool for time-varying signals aquired from multiple sources, that may differ in offset and/or sample rate.
SynScope allows to define reference points that correspond to identical events between source pairs. It then estimates the offset and resample rate to link these sources. I.e., it maps sample time from one source to the other via a link equation.
Signal alignment can be inspected with (i) synchronous visualization or
(ii) resampling.
(i) Synchronous visualization: linked signals scroll together according
to the link relation.
(ii) Resampling: linked signals are resampled to the highest sample
rate and offset-compensated.
Resampled signals can be merged in a single file. Reference points and link relations can be exported for use in other programs.
A typical usage example is the inspection of data recorded from multiple sensors aquired on different systems.
Key features
- Multiple signal sources
- Multiple channels per sources
- Multiple, configurable, views of the sources
- Navigation through signal waveform (scroll, zoom, etc.)
- Interactive specification of the reference points between signal pairs
- Automatic estimation of signal offset and resample factor (source link) between pairs of signals from the reference points.
- Configurable activation of links between signal sources
- Synchronized visualization of linked signals; linked signals scroll jointly according to the link equation
- Resampling of linked sources (builtin and with Matlab support)
- Merge and save resampled sources
License
GPL V.2History
| Version |
Release date |
Changes |
| 1.01 |
24.08.2009 |
Patch for linux compile |
| 1.00 |
08.08.2009 |
Initial release |
Download
| Version |
Source |
Windows binary |
| 1.01 |
SynScope_1.01-src |
SynScope_1.01-win |
| 1.00 |
SynScope_1.00-src |
SynScope_1.00-win |
This project is hosted on gna.org. Pull the latest code directly from the SVN:
svn co svn://svn.gna.org/svn/dscope/trunk dscope
Contribute code directly via SVN by becoming a project member.